Table des matières
Transmission 433Mhz
Module Arduino low cost

Si4432

Schema Arduino

Introduction
Il s'agit d'un module RF paramétrable qui peut être utilisé pour différent types de protocoles de communication.
Avantages :
- Fréquence paramétrable (240Mhz à 930Mhz)
- Émetteur et récepteur
- Puissance d'émission paramétrable (~1km de portée à puissance max)
- Librairie Arduino
- Modulation paramétrable FSK, GFSK, OOK, ASK
- Gestion de certains protocoles directement en interne (Envoi des données à transmettre et le chip gère le format des trames) ou possibilité d'utiliser une entrée DATA qui modulera le signal radio (Possibilité de faire ses trames avec les timings qu'on souhaite)
Inconvénients :
- Fonctionne en 3.3V
- Pas de 1.27mm sur le module
Achat
- Amazon - Prix ~8€
Analyser et reproduire une trame 433Mhz
Outil
J'utilise un SDR NooElec NESDR SMArt qui fonctionne avec le logiciel SDRSharp - Téléchargement
Installation
- Télécharger SDRSharp
- Lancer install-rtlsdr.bat
- Lancer Zadig.exe
- Dans Options : Cocher List All Devices et Décocher Ignore Hubs or composite Parents
- Sélectionner RTL2838UHIR vérifier USB ID 0BDA 2838
- Sélectionner WinUSB
- Cliquer sur Reinstall Driver

Utilisation
- Démarrer SDRSharp
- Dans source RTL-SDR (USB)
- Dans configuration, sélectionner Generique RTL2832U OEM

- Cliquer sur le bouton play
Exemple d'appui sur le bouton de la télécommande de mon portail

- Enregistrement des données transmises par la télécommande
Dans le menu Recording cliquer sur le bouton record puis appuyer sur le bouton de votre télécommande. SDRSharp

SDRSharp va créer un fichier audio dans son répertoire :
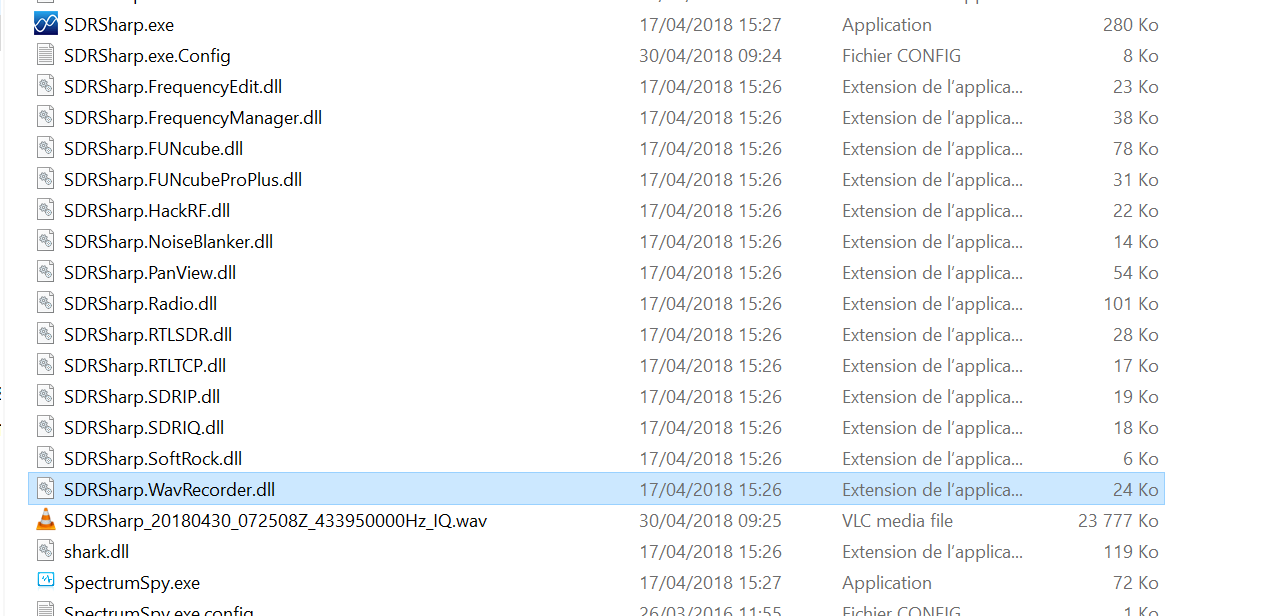
Il est possible d'ouvrir ce fichier avec Audacity ou Wavosaur que je préfère et qui permet de facilement mesurer les temps des différents états de la trame.
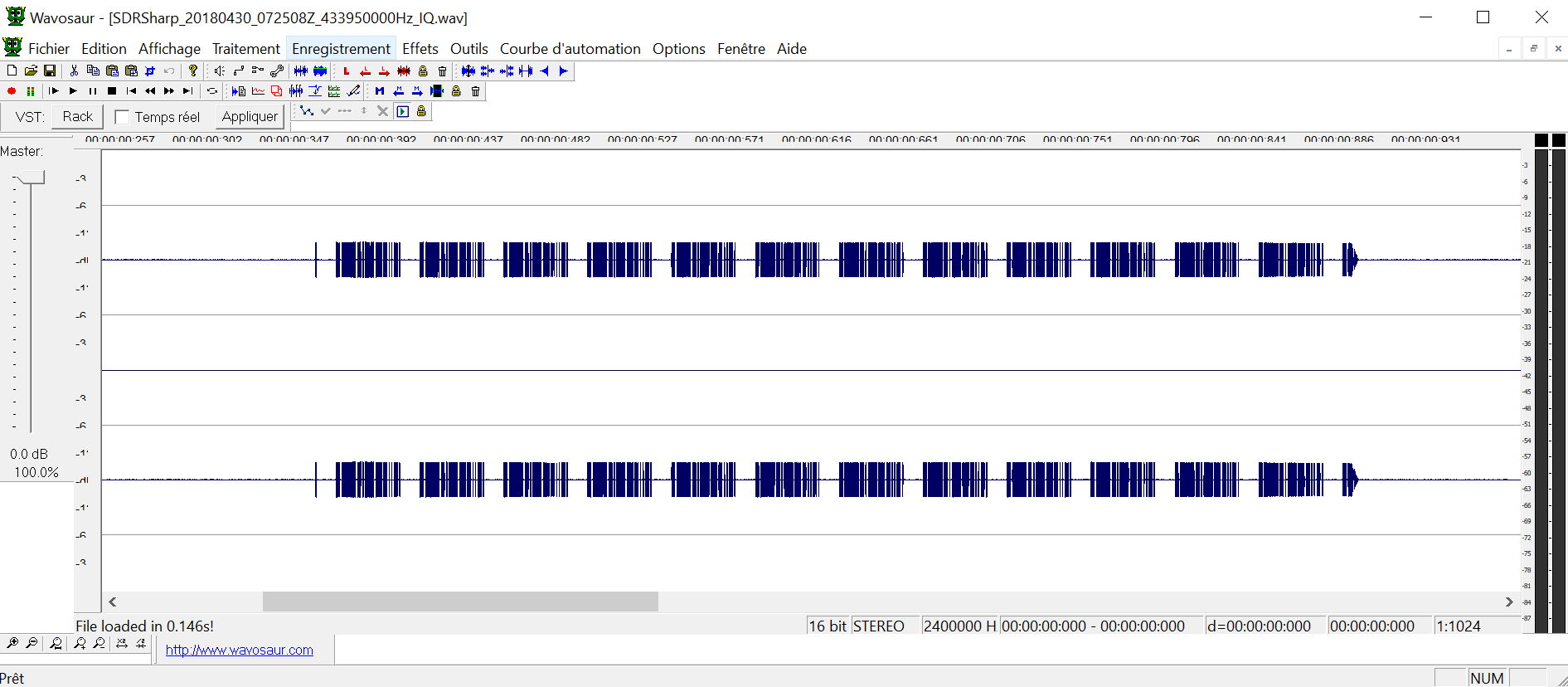
- Ouvrir le fichier avec Wavosaur
Trames reçues :
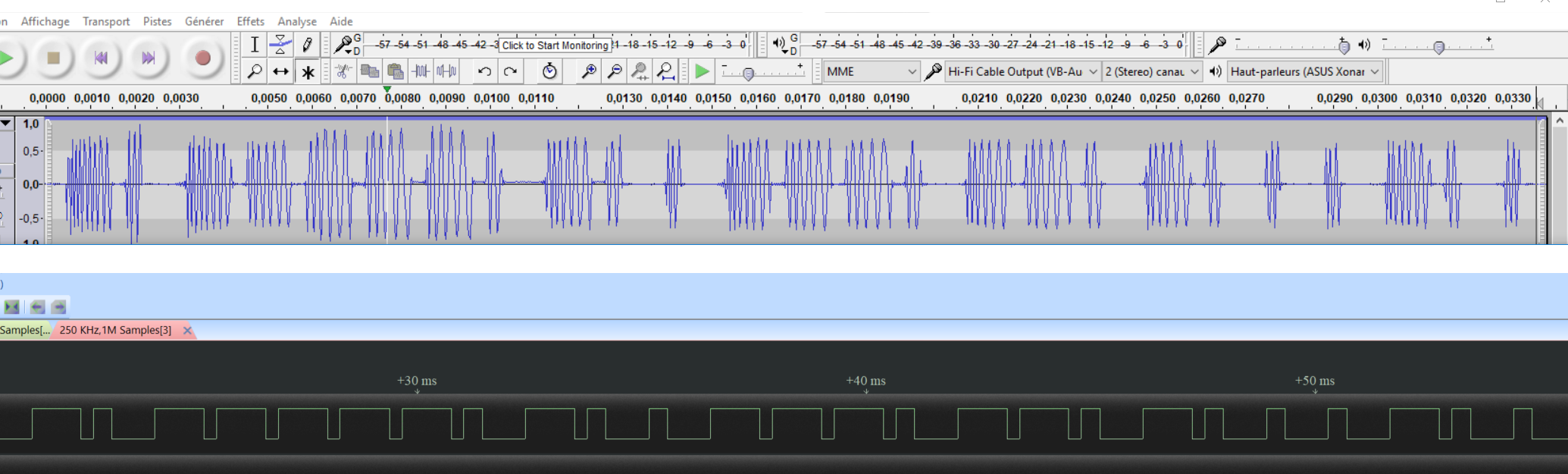
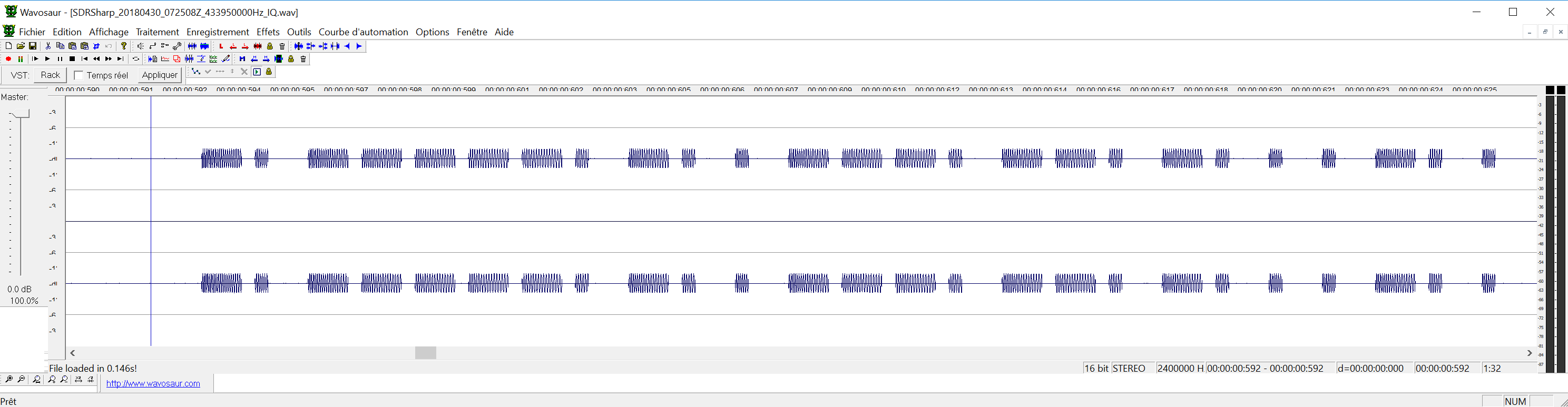
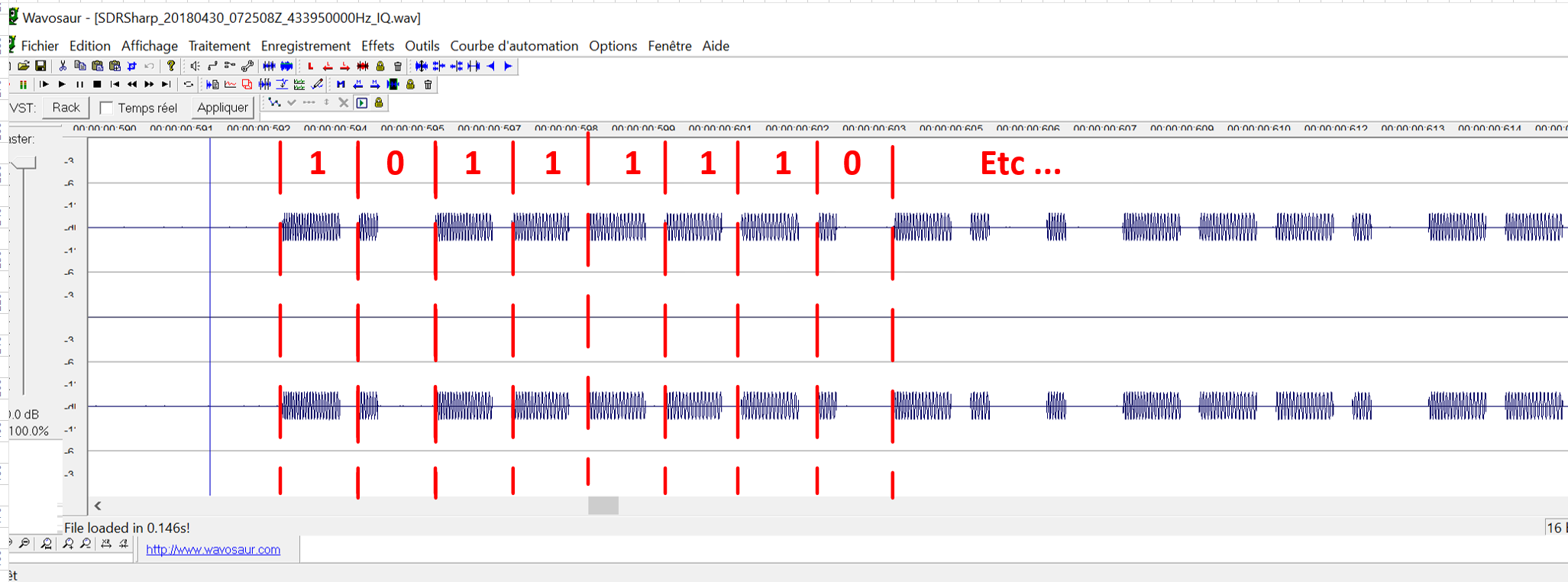
Détail d'une trame :
Décodage d'une trame OOK :
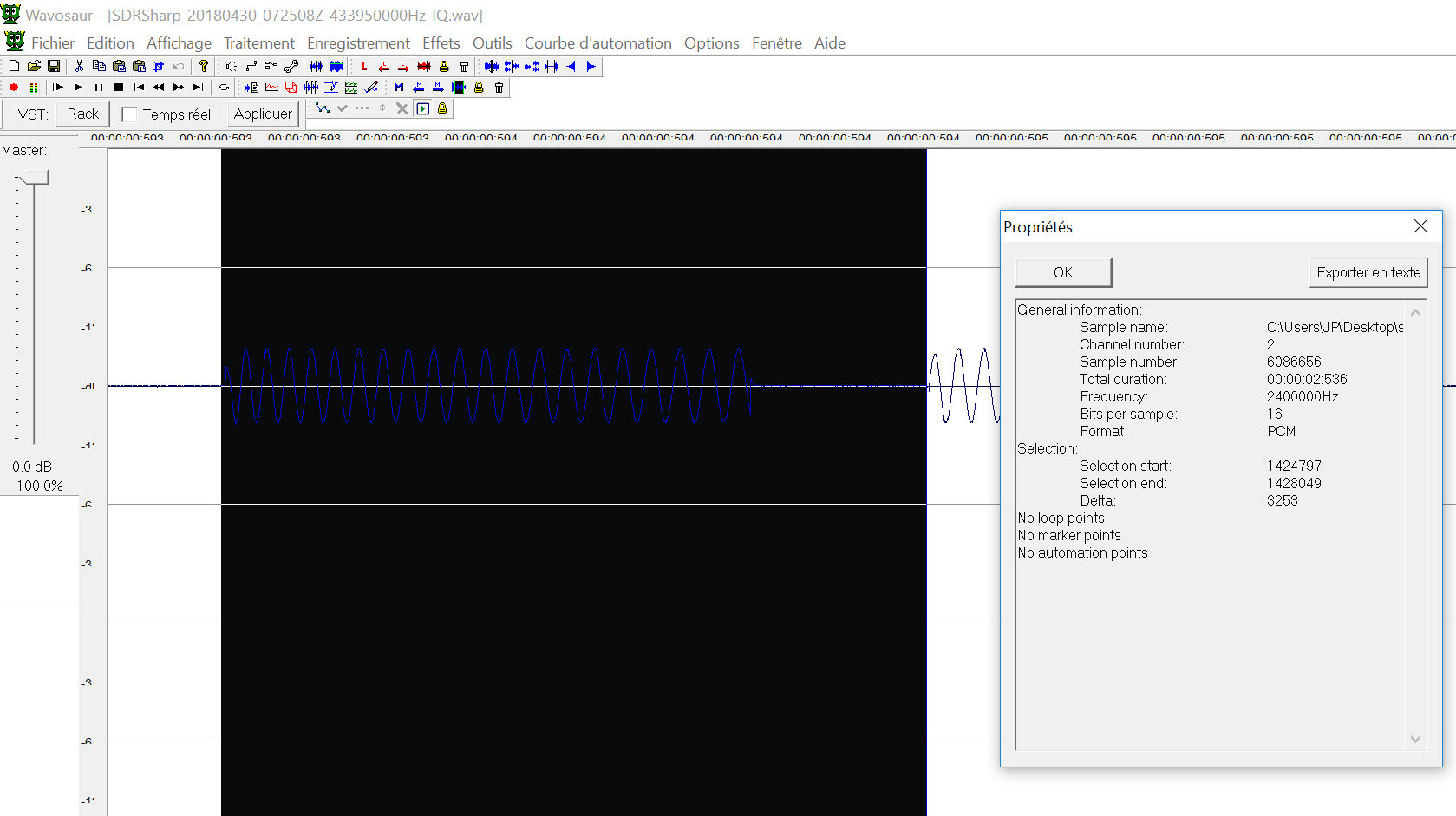
Mesure des temps :
Sélectionner la partie de trame à mesurer puis faire un clic droit et propriétés. Wavosaur indique que la fréquence échantillonnage est de 2 400 000 Hz et que 3253 échantillons sont sélectionnés. La période est donc de 1/2400000*3253 = 1.355ms
Reproduction du code
Une fois que le code lu, vous pouvez utiliser le code ci dessous pour le revoyer facilement vers un transmetteur 433Mhz.
Indiquer les temps en micro seconde à l'état haut et l'état bas quand un bit est à '1' ou '0'
unsigned int TimeHighLevelHigh = 1088; unsigned int TimeLowLevelHigh = 272; unsigned int TimeHighLevelLow = 408; unsigned int TimeLowLevelLow = 952;
- |main.ino
#include "RfManager.h" RfManager rfManager = RfManager(); unsigned char code[] = { 1,0,1,1,1,1,1,0,1,0,0,1,1,1,0,1,1,0,1,0,0,0,1,0,0}; //Code bouton void setup() { rfManager.setTransmitPin(4); } void loop() { if (digitalRead(6) == 0) { rfManager.send(code, sizeof(code)); //Attend 10 ms delay(10); } }
- |RfManager.cpp
#include "RfManager.h" unsigned char TransmitPin = 0; unsigned int TimeHighLevelHigh = 1088; unsigned int TimeLowLevelHigh = 272; unsigned int TimeHighLevelLow = 408; unsigned int TimeLowLevelLow = 952; RfManager::RfManager() { } void RfManager::send(unsigned char* code, unsigned int length) { for (int i = 0; i <length; i++) { if (code[i] == 1) transmit(1); else transmit(0); } } void RfManager::setTransmitPin(unsigned char pin) { TransmitPin = pin; pinMode(TransmitPin, OUTPUT); } void RfManager::transmit(unsigned char bit) { if (bit == 1) { digitalWrite(TransmitPin, 1); delayMicroseconds(TimeHighLevelHigh); digitalWrite(TransmitPin, 0); delayMicroseconds(TimeLowLevelHigh); } else { digitalWrite(TransmitPin, 1); delayMicroseconds(TimeHighLevelLow); digitalWrite(TransmitPin, 0); delayMicroseconds(TimeLowLevelLow); } }
- |RfManager.h
#ifndef _RfManager_h #define _RfManager_h #if defined(ARDUINO) && ARDUINO >= 100 #include "Arduino.h" #endif #include <stdint.h> class RfManager { public: RfManager(); void send(unsigned char* code, unsigned int length); void setTransmitPin(unsigned char pin); private: void transmit(unsigned char bit); }; #endif
Résultat sur la sortie de l'Arduino :